Application of Cygnus SLAM Scanner in Forestry Surveys
CLICK HERE TO DOWNLOAD THIS CASE STUDY
Project Background
Point clouds reflect the positional relationship of target objects in three-dimensional space and are one of the important data forms for extracting forest resource information.
With the deepening of forest resource survey, the spatial information acquisition method based on single platform lidardata has the shortcomings of low accuracy and poor data integrity, which cannot meet the requirements of precision forestry for high accuracy of forest information extraction.
Solution overview
Based on the preliminary survey of forest area, we choose a low-cost UAV LiDAR and mobile SLAM system as a solution for collecting the more complete tree information through the fusion of air and ground data.
In order to merge the data, mobile SLAM system we select the Cygnus backpack system with RTK. Due to the poor local network signal, our backpack SLAM RTK share the same base station with drone LiDAR system,the communication is connected through external radio station mode.
The two methods are collected at the same time. The drone captures the area about 11 minutes, and the backpack SLAM scanning including 2 scans and one scan takes 30 minutes. The scanning trajectory of mobile SLAM adopts a snake-shaped trajectory around the tree, and the scanning gap not exceed 10m according to the terrain conditions. For the problem that RTK cannot be fixed due to tree occlusion from time to time, we try to repeat the scan as much as possible in the case of fixed RTK to increase the constraints of fixed RTK observations on the SLAM trajectory.
Comparison of multi-platform LiDAR systems
Due to the complex forest environment and dense occlusion, the operation of a single LiDAR platform is limited, and the scanning range cannot cover the entire forest area, resulting in a data hole in spatial information acquisition, making it difficult to apply in complex forest areas. To obtain more detailed forest point clouds, the combination of LiDAR platforms is usually used.
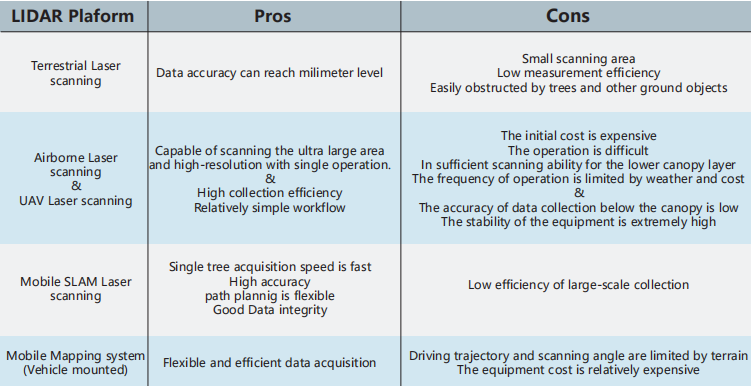
Chart1 Comparison of advantages and disadvantages of 3D LiDAR systems
UAV LiDAR data
For the UAV LiDAR system, we use the SatLab S1 UAV LiDAR, which can collect the point cloud and image data in the same time. After processing the RINEX data, we import the GNSS, IMU, laser and image data into SatLiDAR software for one-click data combing and export the final color point cloud (*.las file).

Figure 1 SatLab S1 UAV LiDAR Workflow
The drone has a flight time of about 11 minutes, the point cloud density is 508.79 pts/m2. The UAV LiDAR point cloud and cross section are shown as followed. Missing data can be seen below the canopy.

Backpack SLAM data
The SatLab Cygnus backpack SLAM system can be seen on Figure 2, the output SLAM data can be transformed to local coordinate for georeferencing. The SLAM point cloud is shown in figure 10.The point cloud density is around 2539.59 pts/m2.

Data fusion and Processing
We put the UAV LiDAR point cloud and the SLAM point cloud into same coordinate system and segment the interesting area to extract the forest information. The fusion of UAV LiDAR point cloud and SLAM point cloud and the cross section of the fusion data are shown in figure 11. The combination of the two methods shows the complete structure of the tree. The fusion point cloud density is 4701.48 pts/m2.


Considering that massive point cloud processing consumes a large amount of computing resources, we divided the fusion point cloud into blocks and through resampling and denoising to get the relatively clean data. And then we use the cloth simulation filter (CSF) and progressive TIN densification (PTD) as ground filtering to classify ground point cloud. Based on the ground point, we generate DEM. After calculating the point cloud normalization, we use single tree segmentation algorithm to classify tree point cloud. And some trees that were segmented wrong can be manually
edited.
According to the result of segmentation, we can extract the tree species, position, tree height, diameter at breast height (DBH), etc. of a single tree. And the vector of the tree structure can be generated as well.



Conclusion
Through the combination of the UAV LiDAR and the various data obtained by the mobile SLAM scanner in the forest area, it is possible to quickly obtain high-precision forest vertical structure, and to extract the parameters of the single tree structure of the sample plot more accurately and
efficiently.
Compared with traditional survey methods, it significantly reduces labor intensity and costs, enriches data types, and improves monitoring quality. At the same time, it is necessary to reasonably plan the scanning path when using platforms such as ULS (UAV Laser Scanning) and BLS (backpack Laser Scanning) to improve the efficiency and integrity of data collection and increase the possibility of obtaining large-scale forest information in less time.
This new application of ground-to-air LiDAR data fusion, has strong practical significance.


