Eyr – Uma nova geração de receptores GNSS RTK inovadores e à prova de futuro com câmeras duplas
CLIQUE AQUI PARA BAIXAR ESTE ESTUDO DE CASO
Eyr, qual é a diferença?
Com o desenvolvimento da tecnologia de posicionamento de alta precisão, os receptores RTK tornaram-se cada vez mais sofisticados. O Satlab Freyja é o primeiro receptor RTK integrado miniaturizado que pode ser usado como um receptor de satélite.estação de base para complementar o UAV para medições operacionais e mapeamento de drones.
Em 2022, o Eyr é um receptor GNSS inovador com novas tecnologias e recursos alinhados com a aparência miniaturizada do conceito portátil, otimizando os algoritmos do módulo de orientação inercial da IMU, tornando a inicialização do levantamento de inclinação mais fácil e rápida, além de adicionar uma placa-mãe opcional de 1408 canais para melhor aquisição de sinal e dados. A placa-mãe opcional de 1408 canais adquire dados em toda a constelação e banda de frequência. e permite que o usuário obtenha melhores sinais e dados de melhor qualidade durante as medições. Além disso, as duas câmeras exclusivas do Eyr abrirão mais cenários de medição para usuários de mapeamento e criarão mais possibilidades para o futuro.

O apelo infinito de uma câmera dupla projeto
Embora haja alguma experiência em pesquisa na indústria sobre a combinação de câmeras e RTKs, a maioria dos “RTKs de imagem” anteriores eram produtos combinados, onde o receptor do sistema GNSS e a câmera eram quase sempre usados juntos em uma unidade separada.. Isso não era apenas complicado de instalar, mas também muito inconveniente de transportar. O projeto de uma câmera de 360 graus para posicionamento de imagem foi alcançado com a instalação de múltiplas câmeras em diversos ângulos para transmitir imagens durante o desenvolvimento do sensor. Posteriormente, a tecnologia de posicionamento de imagem foi desenvolvida para atender aos requisitos de medição multiangular em uma única câmera. Duas câmeras foram adicionadas criativamente à parte traseira e inferior do receptor. A câmera traseira possui 5 MP. para capturar eumagos durante enquetes e permite que o usuário faça zoom in e out; a câmera inferior tem 2MP para RA sretirar.badicionando a visualização do receptor, por isso a precisão da implantação fica abaixo 3cm e a eficiência da vigilância está aumentando de acordo.

Aplicação de imagem de tripla novidade
Levantamento de imagens, permitindo desbloquear ainda mais possibilidades de mensuração de cenários
Em uma era tão bem desenvolvida de tecnologia de computadores, RA, UAV e outras tecnologias de detecção recebeu ampla atenção na sociedade. A integração da tecnologia de imagem em todas as esferas da vida é a tendência geral; a integração de imagens em instrumentos de posicionamento de alta precisão será a chave para romper o gargalo do cenário de mapeamento tradicional anterior. O método de medição sem contato é a maior vantagem que a tecnologia de posicionamento de imagem oferece aos receptores GNSS RTK. Produtos receptores GNSS altamente integrados são tornar-seing o produtos convencionais e a tecnologia de combinação de sensores IMU com GNSS é bem desenvolvido. Para analisar e processar as imagens, o sensor precisa se posicionar com um 6DoF precisos e robustos, capazes de detectar mudanças nos deslocamentos para cima, para baixo, para frente, para trás, para a esquerda e para a direita devido ao movimento geral, além de mudanças no ângulo do campo de visão causadas pela rotação do receptor. Ao adicionar uma solução de detecção 6DoF à ideia de aquisição de informações de posição a partir de imagens, a Satlab permite que o cliente mantenha a captura sensível dos gestos da câmera enquanto se move com a maior liberdade possível, combinada com técnicas de medição em close-up para produzir resultados de posicionamento mais precisos.
Comutação panorâmica 360 AR sretirada, o controlador e o receptor trabalham juntos para orientar o processo de implantação
A demarcação é uma das funções mais comumente usadas em projetos de topografia e mapeamento.
Tradicionalmente, concluir vários pontos de piquetagem em campo e manter um alto nível de precisão consome muito tempo. No entanto, antes da introdução do Eyr, a única maneira de indicar um ponto de piquetagem em uma cena ao vivo era por meio da câmera traseira do controlador, e era impraticável fixar o ângulo e a altura da câmera perto do ponto de piquetagem, então o usuário tinha que ser guiado até o ponto de piquetagem por uma animação 3D. A câmera inferior do Eyr resolve esse problema combinando a câmera inferior com a função de piquetagem de RA existente. Durante a piquetagem, a câmera do controlador portátil não só pode ser usada como guia para o ponto de piquetagem, como também, quando o usuário estiver a uma distância de 1 m do ponto de piquetagem, a visão da câmera do controlador portátil também mudará 360 graus para a câmera inferior do receptor. Essa combinação ajuda o usuário a alcançar o ponto de piquetagem rapidamente e melhora significativamente a eficiência da piquetagem, idealmente com uma precisão de até 3 cm.
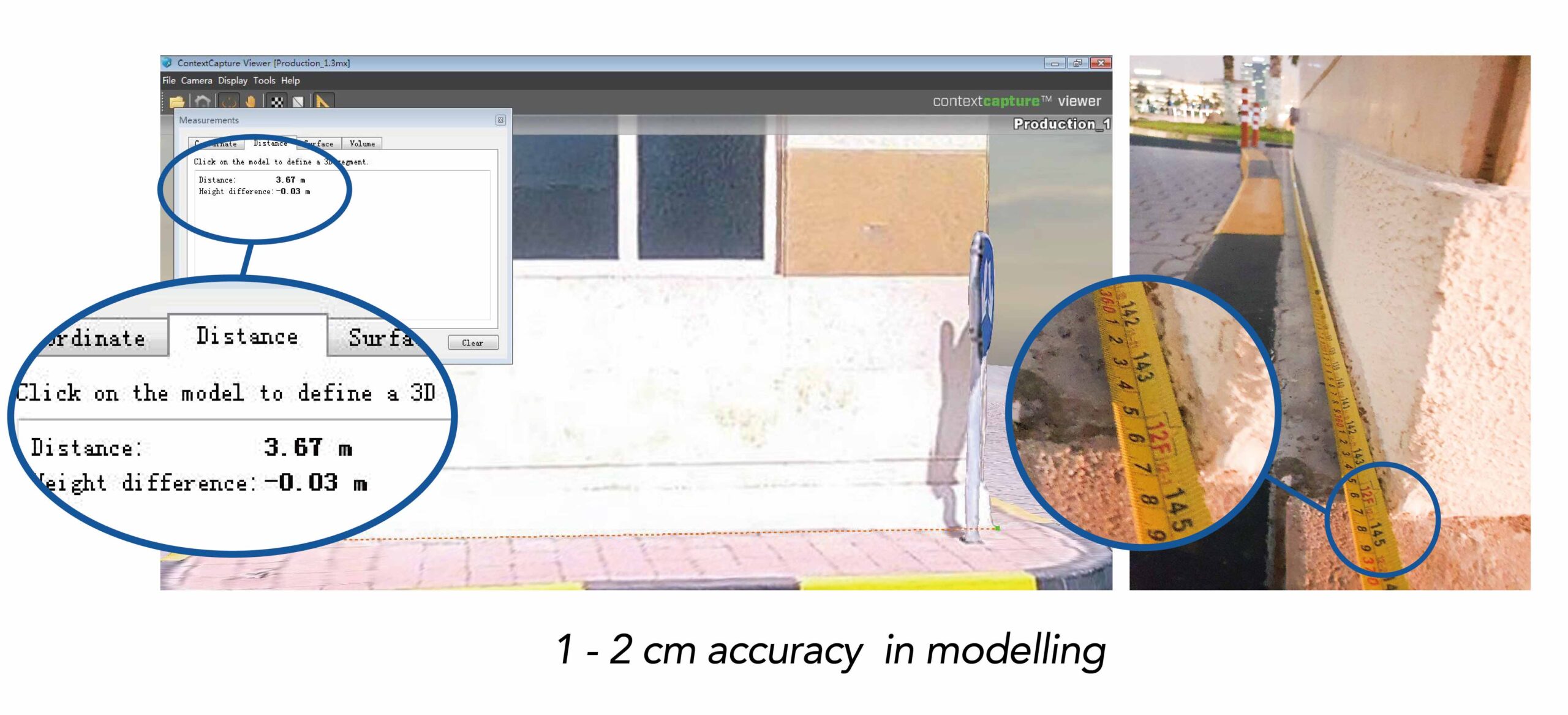
Eyr, capaz de aplicação de modelagem 3D, será uma escolha melhor para receptores UAV e GNSS RTK trabalharem juntos
Com sua configuração de câmera dupla, o Eyr não só supera muitas das barreiras tradicionais aos cenários de medição, como também permite um grau maior e mais fácil de liberdade no processo de medição. A medição sem contato e a piquetagem de realidade aumentada (RA) com visualização ao vivo são os principais recursos do Eyr como ferramenta de medição específica para operações terrestres.
Equipado com os "olhos", o receptor Eyr também desempenha um papel importante em aplicações de UAV. Os dados de imagem registrados pelo novo Eyr da Satlab podem ser importados simultaneamente para o software de pós-processamento de modelagem 3D líder do setor para operações de modelagem, o que é uma ótima notícia para usuários com necessidades de modelagem.
 O Eyr amplia a aplicação para mais casos, atendendo às demandas de diversas situações de medição. Se o Freyja atua como uma estação base para fornecer ao UAV dados de correção mais precisos, a fim de melhorar a precisão dos resultados e aprimorar a experiência por meio de uma navegação aprimorada, o Eyr serve como uma ferramenta colaborativa para ajudar o UAV a obter mais dados de imagem em solo. Os dados de imagem capturados pelo Eyr em solo podem ser importados simultaneamente para o software, complementando os recursos que não podem ser capturados pelo UAV em voo. Isso pode ajudar a obter dados de modelagem 3D mais completos.
O Eyr amplia a aplicação para mais casos, atendendo às demandas de diversas situações de medição. Se o Freyja atua como uma estação base para fornecer ao UAV dados de correção mais precisos, a fim de melhorar a precisão dos resultados e aprimorar a experiência por meio de uma navegação aprimorada, o Eyr serve como uma ferramenta colaborativa para ajudar o UAV a obter mais dados de imagem em solo. Os dados de imagem capturados pelo Eyr em solo podem ser importados simultaneamente para o software, complementando os recursos que não podem ser capturados pelo UAV em voo. Isso pode ajudar a obter dados de modelagem 3D mais completos.



