Aplicação do Cygnus SLAM Scanner em Levantamentos Florestais
CLIQUE AQUI PARA BAIXAR ESTE ESTUDO DE CASO
Histórico do Projeto
Nuvens de pontos refletem a relação posicional de objetos alvo no espaço tridimensional e são uma das formas de dados importantes para extrair informações sobre recursos florestais.
Com o aprofundamento do levantamento de recursos florestais, o método de aquisição de informações espaciais baseado em dados lidar de plataforma única apresenta deficiências de baixa precisão e baixa integridade de dados, o que não consegue atender aos requisitos da silvicultura de precisão para alta precisão na extração de informações florestais.
Visão geral da solução
Com base no levantamento preliminar da área florestal, escolhemos um UAV LiDAR de baixo custo e um sistema SLAM móvel como solução para coletar informações mais completas sobre as árvores por meio da fusão de dados aéreos e terrestres.
Para mesclar os dados, selecionamos o sistema SLAM móvel Cygnus com RTK. Devido ao sinal fraco da rede local, nosso SLAM RTK com mochila compartilha a mesma estação base com o sistema LiDAR do drone, e a comunicação é feita por meio do modo de estação de rádio externa.
Os dois métodos são coletados simultaneamente. O drone captura a área em cerca de 11 minutos, e a varredura SLAM com mochila, incluindo duas varreduras e uma varredura, leva 30 minutos. A trajetória de varredura do SLAM móvel adota uma trajetória em forma de cobra ao redor da árvore, e a distância de varredura não excede 10 m, de acordo com as condições do terreno. Para o problema de que o RTK não pode ser corrigido devido à oclusão da árvore de tempos em tempos, tentamos repetir a varredura o máximo possível no caso de RTK fixo para aumentar as restrições das observações de RTK fixo na trajetória do SLAM.
Comparação de sistemas LiDAR multiplataforma
Devido ao ambiente florestal complexo e à densa oclusão, a operação de uma única plataforma LiDAR é limitada, e o alcance de varredura não consegue cobrir toda a área florestal, resultando em uma lacuna de dados na aquisição de informações espaciais, dificultando sua aplicação em áreas florestais complexas. Para obter nuvens de pontos florestais mais detalhadas, geralmente é utilizada a combinação de plataformas LiDAR.
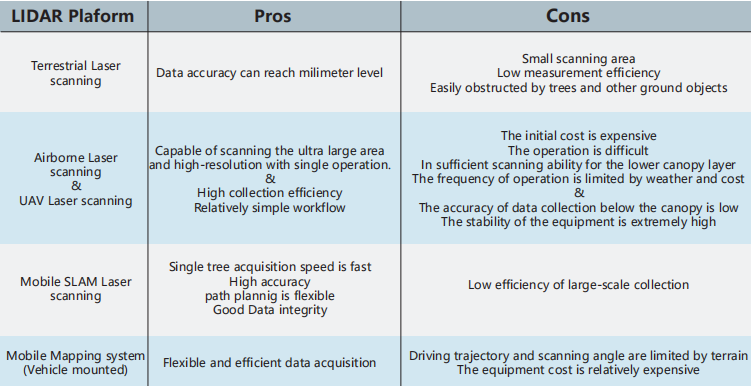
Quadro 1 Comparação de vantagens e desvantagens dos sistemas LiDAR 3D
Dados LiDAR de UAV
Para o sistema LiDAR do UAV, utilizamos o LiDAR SatLab S1 UAV, que coleta a nuvem de pontos e os dados de imagem simultaneamente. Após o processamento dos dados RINEX, importamos os dados de GNSS, IMU, laser e imagem para o software SatLiDAR para a combinação de dados em um clique e exportamos a nuvem de pontos colorida final (arquivo *.las).

Figura 1 Fluxo de trabalho do LiDAR do UAV SatLab S1
O drone tem um tempo de voo de aproximadamente 11 minutos e a densidade da nuvem de pontos é de 508,79 pts/m². A nuvem de pontos LiDAR e a seção transversal do drone são mostradas a seguir. Os dados ausentes podem ser vistos abaixo da cobertura.

Dados do SLAM de mochila
O sistema SLAM de mochila Cygnus da SatLab pode ser visto na Figura 2. Os dados SLAM de saída podem ser transformados em coordenadas locais para georreferenciamento. A nuvem de pontos SLAM é mostrada na Figura 10. A densidade da nuvem de pontos é de aproximadamente 2539,59 pts/m².

Fusão e processamento de dados
Colocamos a nuvem de pontos LiDAR do UAV e a nuvem de pontos SLAM no mesmo sistema de coordenadas e segmentamos a área de interesse para extrair as informações da floresta. A fusão da nuvem de pontos LiDAR do UAV e da nuvem de pontos SLAM, bem como a seção transversal dos dados de fusão, são mostradas na Figura 11. A combinação dos dois métodos mostra a estrutura completa da árvore. A densidade da nuvem de pontos de fusão é de 4701,48 pts/m².


Considerando que o processamento massivo de nuvens de pontos consome uma grande quantidade de recursos computacionais, dividimos a nuvem de pontos de fusão em blocos e, por meio de reamostragem e redução de ruído, obtivemos dados relativamente limpos. Em seguida, usamos o filtro de simulação de tecido (CSF) e a densificação TIN progressiva (PTD) como filtragem de solo para classificar a nuvem de pontos de solo. Com base no ponto de solo, geramos o DEM. Após calcular a normalização da nuvem de pontos, usamos o algoritmo de segmentação de árvore única para classificar a nuvem de pontos de árvore. Algumas árvores que foram segmentadas incorretamente podem ser manualmente.
editado.
Com base no resultado da segmentação, podemos extrair as espécies, a posição, a altura, o diâmetro à altura do peito (DAP), etc. de uma única árvore. Além disso, o vetor da estrutura da árvore também pode ser gerado.



Conclusão
Por meio da combinação do UAV LiDAR e dos vários dados obtidos pelo scanner SLAM móvel na área florestal, é possível obter rapidamente a estrutura vertical da floresta de alta precisão e extrair os parâmetros da estrutura de árvore única do gráfico amostral com mais precisão e
eficientemente.
Comparado aos métodos tradicionais de levantamento, reduz significativamente a intensidade de trabalho e os custos, enriquece os tipos de dados e melhora a qualidade do monitoramento. Ao mesmo tempo, é necessário planejar razoavelmente o caminho de varredura ao utilizar plataformas como ULS (Varredura a Laser de Veículos Aéreos Não Tripulados) e BLS (Varredura a Laser de Mochila) para melhorar a eficiência e a integridade da coleta de dados e aumentar a possibilidade de obter informações florestais em larga escala em menos tempo.
Esta nova aplicação de fusão de dados LiDAR solo-ar tem forte significado prático.


