森林調査におけるCygnus SLAMスキャナの応用
このケーススタディをダウンロードするにはここをクリックしてください
プロジェクトの背景
点群は、対象物の3次元空間における位置関係を反映しており、森林資源情報を抽出するための重要なデータの一つです。
森林資源調査の深化に伴い、単一プラットフォームのライダーデータに基づく空間情報取得方法は、精度が低く、データの整合性が悪いという欠点があり、高精度の森林情報抽出に対する精密林業の要件を満たすことができません。
ソリューションの概要
森林地域の予備調査に基づき、空中データと地上データの融合を通じてより完全な樹木情報を収集するためのソリューションとして、低コストの UAV LiDAR とモバイル SLAM システムを選択しました。
モバイルSLAMシステムとデータを統合するために、RTK搭載のCygnusバックパックシステムを選択しました。ローカルネットワークの信号が弱いため、バックパックSLAM RTKはドローンLiDARシステムと同じベースステーションを共有し、通信は外部無線ステーションモードを介して接続されます。
2つの手法は同時に収集されます。ドローンは約11分でエリアを撮影し、バックパックSLAMスキャンは2回のスキャンと1回のスキャンを含めて30分かかります。モバイルSLAMのスキャン軌跡は、樹木の周りを蛇行する軌跡を採用し、地形条件に応じてスキャンギャップは10mを超えないようにします。樹木に遮られてRTKを固定できないという問題が発生するため、固定RTKの場合は可能な限りスキャンを繰り返すことで、固定RTK観測のSLAM軌道への制約を高めます。
マルチプラットフォームLiDARシステムの比較
森林環境は複雑で、遮蔽物も密集しているため、単一のLiDARプラットフォームでは運用範囲が限られており、スキャン範囲が森林全体をカバーできないため、空間情報取得にデータホールが発生し、複雑な森林地域への適用が困難です。より詳細な森林点群を取得するには、通常、複数のLiDARプラットフォームを組み合わせて使用します。
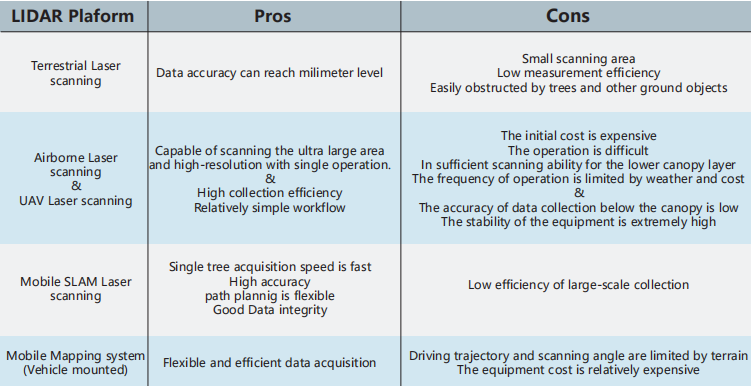
図1 3D LiDARシステムの長所と短所の比較
UAV LiDARデータ
UAV LiDARシステムには、点群データと画像データを同時に収集できるSatLab S1 UAV LiDARを使用しています。RINEXデータを処理した後、GNSS、IMU、レーザー、画像データをSatLiDARソフトウェアにインポートし、ワンクリックでデータ結合を行い、最終的なカラー点群(*.lasファイル)をエクスポートします。

図1 SatLab S1 UAV LiDARワークフロー
ドローンの飛行時間は約11分、点群密度は508.79ポイント/m²です。UAV LiDARの点群と断面は以下の通りです。樹冠の下には欠落データが見られます。

バックパックSLAMデータ
SatLab CygnusバックパックSLAMシステムは図2に示されています。出力されたSLAMデータは、地理参照のためにローカル座標に変換できます。SLAM点群は図10に示されています。点群密度は約2539.59点/m2です。

データ融合と処理
UAV LiDAR点群とSLAM点群を同じ座標系に配置し、関心領域をセグメント化することで森林情報を抽出しました。UAV LiDAR点群とSLAM点群の融合データと、融合データの断面を図11に示します。2つの手法を組み合わせることで、樹木の完全な構造が明らかになります。融合点群の密度は4701.48 pts/m²です。


大規模な点群処理は膨大な計算リソースを消費することを考慮し、フュージョン点群をブロックに分割し、リサンプリングとノイズ除去によって比較的クリーンなデータを取得しました。その後、地表フィルタリングとして、クロスシミュレーションフィルタ(CSF)とプログレッシブTINデンシフィケーション(PTD)を用いて地表点群を分類しました。地表点に基づいてDEMを生成します。点群の正規化を行った後、単一樹木セグメンテーションアルゴリズムを用いて樹木点群を分類しました。誤ってセグメンテーションされた樹木は、手動で修正できます。
編集されました。
セグメンテーションの結果に基づいて、一本の木の樹種、位置、樹高、胸高直径(DBH)などを抽出できます。また、樹木構造のベクトルを生成することもできます。



結論
UAV LiDARと森林地帯の移動SLAMスキャナによって得られた様々なデータを組み合わせることで、高精度の森林の垂直構造を迅速に取得し、サンプル区画の単木構造のパラメータをより正確に抽出することができる。
効率的に。
従来の調査方法と比較して、労働強度とコストを大幅に削減し、データの種類を豊富にし、モニタリングの質を向上させます。同時に、ULS(UAVレーザースキャン)やBLS(バックパックレーザースキャン)などのプラットフォームを使用する場合、スキャン経路を合理的に計画することで、データ収集の効率と整合性を向上させ、より短時間で大規模な森林情報を取得する可能性を高めます。
地上対空中 LiDAR データ融合のこの新しいアプリケーションは、大きな実用的意義を持っています。


