Application du scanner Cygnus SLAM aux relevés forestiers
CLIQUEZ ICI POUR TÉLÉCHARGER CETTE ÉTUDE DE CAS
Contexte du projet
Les nuages de points reflètent la relation de position des objets cibles dans l’espace tridimensionnel et constituent l’une des formes de données importantes pour l’extraction d’informations sur les ressources forestières.
Avec l'approfondissement de l'enquête sur les ressources forestières, la méthode d'acquisition d'informations spatiales basée sur des données lidar à plate-forme unique présente des défauts de faible précision et de mauvaise intégrité des données, qui ne peuvent pas répondre aux exigences de la foresterie de précision pour une grande précision d'extraction d'informations forestières.
Présentation de la solution
Sur la base de l'étude préliminaire de la zone forestière, nous avons choisi un système LiDAR UAV à faible coût et un système SLAM mobile comme solution pour collecter des informations plus complètes sur les arbres grâce à la fusion des données aériennes et terrestres.
Afin de fusionner les données, nous avons choisi le système SLAM mobile Cygnus avec RTK. En raison de la faible qualité du signal du réseau local, notre SLAM RTK partage la même station de base avec le système LiDAR du drone ; la communication s'effectue via une station radio externe.
Les deux méthodes sont collectées simultanément. Le drone capture la zone en environ 11 minutes, tandis que le balayage SLAM du sac à dos, comprenant deux balayages et un balayage, dure 30 minutes. La trajectoire de balayage du SLAM mobile suit une trajectoire en serpentin autour de l'arbre, l'espacement de balayage ne dépassant pas 10 m selon les conditions du terrain. Face à l'impossibilité de fixer le RTK en raison de l'occlusion ponctuelle de l'arbre, nous essayons de répéter le balayage autant que possible dans le cas d'un RTK fixe afin d'augmenter les contraintes des observations RTK fixes sur la trajectoire du SLAM.
Comparaison des systèmes LiDAR multiplateformes
En raison de la complexité de l'environnement forestier et de la densité de l'occlusion, le fonctionnement d'une seule plateforme LiDAR est limité et la portée de balayage ne peut couvrir l'ensemble de la zone forestière. Cela entraîne un manque de données dans l'acquisition d'informations spatiales, rendant son application difficile dans les zones forestières complexes. Pour obtenir des nuages de points forestiers plus détaillés, on utilise généralement une combinaison de plateformes LiDAR.
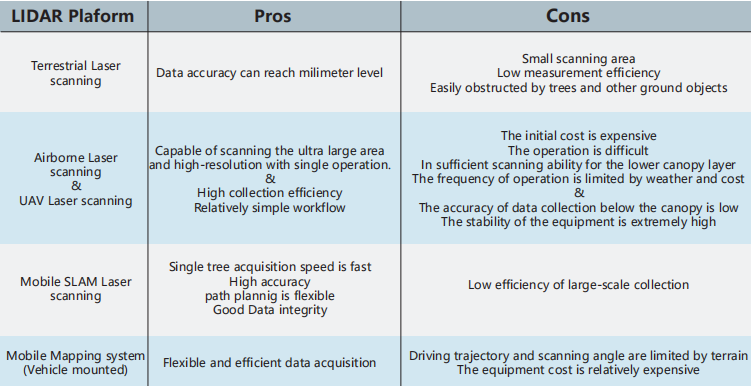
Graphique 1 Comparaison des avantages et des inconvénients des systèmes LiDAR 3D
Données LiDAR des drones
Pour le système LiDAR pour drone, nous utilisons le LiDAR SatLab S1, capable de collecter simultanément le nuage de points et les données d'image. Après traitement des données RINEX, nous importons les données GNSS, IMU, laser et d'image dans le logiciel SatLiDAR pour un traitement en un clic et l'exportation du nuage de points couleur final (fichier *.las).

Figure 1 Flux de travail du LiDAR pour drone SatLab S1
Le drone a une autonomie de vol d'environ 11 minutes et la densité du nuage de points est de 508,79 pts/m². Le nuage de points et la coupe transversale du LiDAR du drone sont présentés ci-dessous. Les données manquantes sont visibles sous la canopée.

Données du sac à dos SLAM
Le système SLAM du SatLab Cygnus Backpack est illustré à la figure 2. Les données SLAM de sortie peuvent être converties en coordonnées locales pour le géoréférencement. Le nuage de points SLAM est présenté à la figure 10. Sa densité est d'environ 2 539,59 points/m².

Fusion et traitement des données
Nous avons placé le nuage de points LiDAR UAV et le nuage de points SLAM dans le même système de coordonnées et segmenté la zone d'intérêt pour extraire les informations forestières. La fusion des nuages de points LiDAR UAV et SLAM, ainsi que la coupe transversale des données fusionnées, sont présentées dans la figure 11. La combinaison des deux méthodes illustre la structure complète de l'arbre. La densité du nuage de points fusionné est de 4 701,48 points/m².


Étant donné que le traitement massif de nuages de points consomme beaucoup de ressources de calcul, nous avons divisé le nuage de points de fusion en blocs, puis procédé à un rééchantillonnage et à un débruitage pour obtenir des données relativement propres. Nous utilisons ensuite le filtre de simulation de tissu (CSF) et la densification progressive TIN (PTD) comme filtrage de base pour classer le nuage de points de base. À partir de ce point de base, nous générons un MNE. Après avoir calculé la normalisation du nuage de points, nous utilisons un algorithme de segmentation d'arbre unique pour classer le nuage de points d'arbre. Certains arbres mal segmentés peuvent être manuellement.
édité.
Selon les résultats de la segmentation, nous pouvons extraire l'espèce, la position, la hauteur, le diamètre à hauteur de poitrine (DBH), etc. d'un arbre. Le vecteur de structure de l'arbre peut également être généré.



Conclusion
Grâce à la combinaison du LiDAR UAV et des différentes données obtenues par le scanner mobile SLAM dans la zone forestière, il est possible d'obtenir rapidement une structure verticale forestière de haute précision et d'extraire les paramètres de la structure arborescente unique de la parcelle d'échantillonnage avec plus de précision et
efficacement.
Comparée aux méthodes d'enquête traditionnelles, elle réduit considérablement la charge de travail et les coûts, enrichit les types de données et améliore la qualité du suivi. Parallèlement, il est nécessaire de planifier judicieusement le parcours de numérisation lors de l'utilisation de plateformes telles que l'ULS (UAV Laser Scanning) et le BLS (Backpack Laser Scanning) afin d'améliorer l'efficacité et l'intégrité de la collecte de données et d'accroître les possibilités d'obtenir des informations forestières à grande échelle plus rapidement.
Cette nouvelle application de fusion de données LiDAR sol-air a une grande importance pratique.


