Aplicação do Cygnus SLAM Scanner em Levantamentos Topográficos Urbanos
CLIQUE AQUI PARA BAIXAR ESTE ESTUDO DE CASO
Histórico do Projeto
Para o mapeamento topográfico urbano, em algumas áreas onde a permissão de voo não pode ser facilmente aplicada, o levantamento móvel terrestre é uma solução ideal devido à sua flexibilidade e menor restrição. Além disso, o uso de tecnologias de sensoriamento remoto aéreo, como fotogrametria e LiDAR aerotransportado, para mapeamento topográfico urbano não consegue obter informações 3D completas da cidade, e lacunas de dados ocorrem devido à oclusão de objetos terrestres.
No caso a seguir, utilizamos a aplicação multiplataforma do SLAM para coletar informações 3D de viadutos urbanos e espaços sob pontes, estradas e túneis, como complemento aos dados de ALS (Airborne Laser Scanning). Além do modo portátil, os scanners a laser SLAM também podem ser utilizados em mochilas, em veículos e no ar.
Visão geral do caso
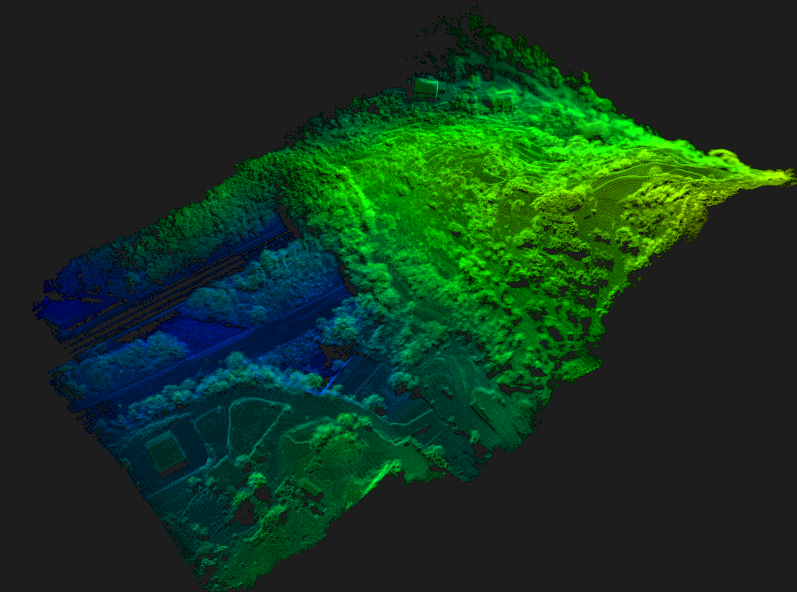
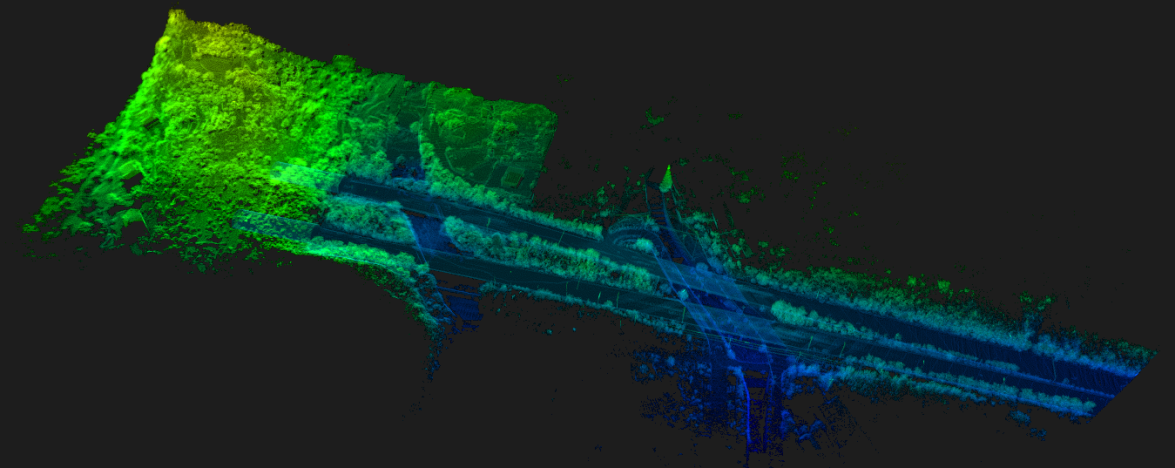
Temos os dados ALS originais da via expressa e de seus arredores, porém, faltam informações completas sobre estradas, pontes e túneis. Para melhor expressar os dados completos dessa área, utilizamos o escaneamento a laser móvel baseado em SLAM para capturar dados de nuvem de pontos mais detalhados e completos. Os dados ALS originais são mostrados na Figura 1.
Primeiramente, a área da ponte foi mapeada e diversos preparativos, como o experimento de pré-aquisição de dados de nuvem de pontos, foram realizados. De acordo com o ambiente de campo e a validação do método técnico, dois métodos de varredura, incluindo a varredura a laser montada em veículo e a varredura a laser em mochila, foram selecionados para a aquisição de dados de nuvem de pontos, a fim de obter dados de nuvem de pontos de alta precisão de forma mais eficiente e flexível. Para o viaduto e o espaço sob a ponte, utilizamos o método de varredura a laser em mochila. Para a coleta de informações de estradas e túneis, instalamos o scanner SLAM no veículo para varredura.
Sistema de escaneamento a laser móvel para mochila
Em cenários externos, os usuários podem utilizar um sistema de escaneamento a laser móvel com mochila, utilizando o RTK. O sistema de escaneamento a laser móvel com mochila é leve e robusto, podendo obter dados de nuvem de pontos em áreas restritas à circulação humana. Ao converter a observação RTK e a trajetória SLAM, os usuários podem obter a nuvem de pontos com coordenadas absolutas. As observações RTK podem ser usadas como valores de referência para verificar a precisão absoluta do SLAM. As observações RTK podem ser adicionadas como valores de observação globais (semelhantes a uma restrição de malha fechada) para corrigir o erro cumulativo do SLAM. A imagem a seguir mostra o sistema de escaneamento móvel com mochila Cygnus com RTK.

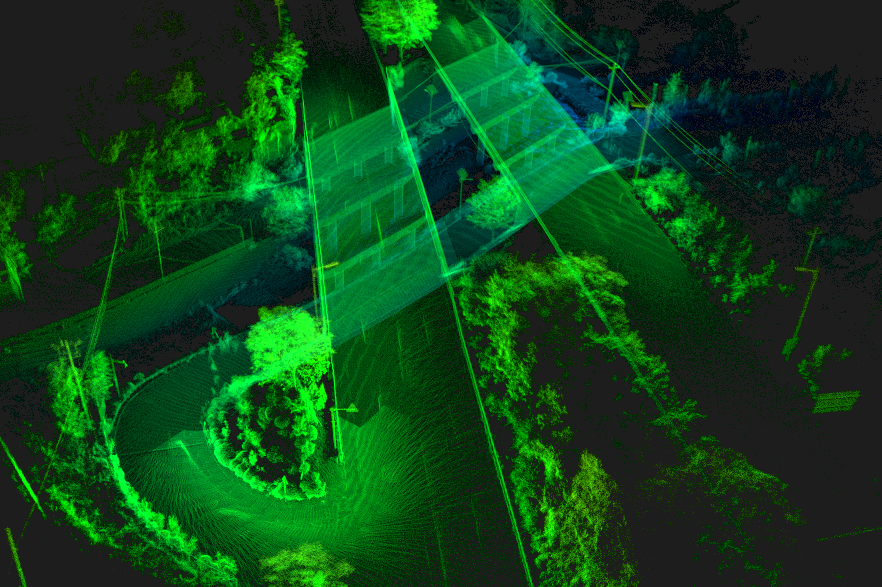
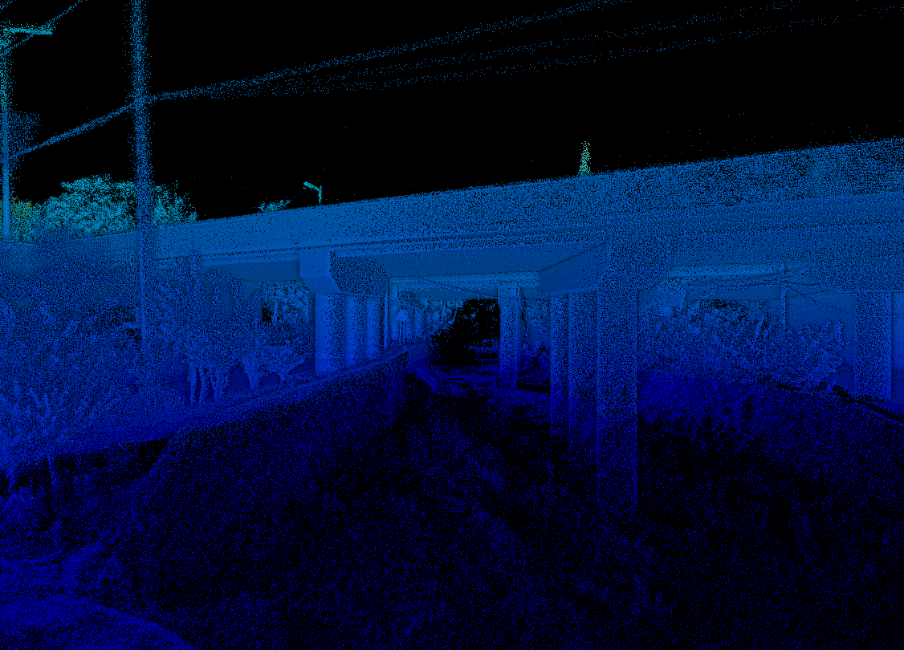
Utilizamos o sistema de laser móvel Cygnus com RTK para capturar a área da ponte. A visão geral dos dados da nuvem de pontos de varredura da mochila é mostrada na Figura 3 e os detalhes do espaço sob a ponte estão na Figura 4.
Sistema de digitalização SLAM de bordo
Os scanners SLAM também podem ser estendidos a aplicações veiculares. Em termos de cenários de corredores, como estradas e túneis, a montagem do scanner SLAM no carro permite a coleta dinâmica de dados durante viagens unidirecionais ou bidirecionais ao longo da estrada, o que reduz significativamente o tempo de varredura em vez de caminhar. Para o medidor, também é relativamente fácil de usar. O kit veicular é mostrado na Figura 5-a, e a visão geral da aplicação veicular para o scanner SLAM é mostrada na Figura 5-b.

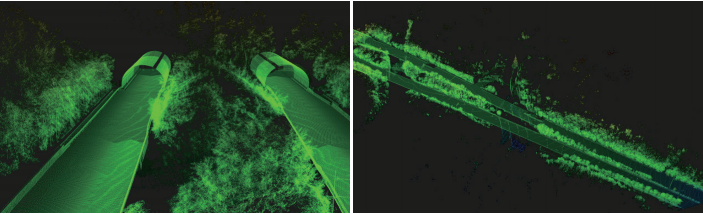
Instalamos scanners Cygnus SLAM no carro e também utilizamos o RTK. Para obter resultados de melhor qualidade, definimos vários pontos de controle caso o sinal GNSS seja desbloqueado. Além disso, a operação de varredura de ida e volta torna a trajetória em loop fechado, garantindo dados mais confiáveis. Os dados da nuvem de pontos da varredura a bordo são mostrados na Figura 6-a, e a nuvem de pontos da entrada do túnel é refletida na Figura 6-b.
Dados de nuvem de pontos de múltiplas fontes
Ambos os tipos de dados são resolvidos automaticamente com uma única tecla, através do controle do aplicativo SLAM Manager da Cygnus. Sem muita intervenção manual, isso pode economizar bastante mão de obra e tempo na produção real. A fusão de dados da nuvem de pontos unifica os dados veiculares, de mochila e aéreos originais em um sistema de coordenadas consistente e exporta a nuvem de pontos no formato *.las. Os dados da nuvem de pontos fundidos garantem a integridade da ponte e do ambiente ao redor, evitando ao máximo a "lacuna" de dados. Os dados completos são mostrados na Figura 7.
Conclusão
Aproveitamos a versatilidade do scanner a laser SLAM, como a capacidade de ser montado em mochila ou em veículo, para realizar uma melhor coleta de dados e combinar a solução SLAM com outras tecnologias de sensoriamento remoto aéreo para obter informações urbanas tridimensionais mais completas e detalhadas.

