都市地形調査におけるCygnus SLAMスキャナの応用
このケーススタディをダウンロードするにはここをクリックしてください
プロジェクトの背景
都市地形図の作成において、飛行許可の取得が容易でない地域においては、地上移動測量は柔軟性が高く制約が少ないため理想的なソリューションとなります。また、写真測量や航空LiDARなどの航空リモートセンシング技術を用いた都市地形図作成では、都市の完全な3D情報を取得することができず、地上物体の遮蔽によりデータに欠落が生じる可能性があります。
以下のケースでは、SLAMのマルチプラットフォームアプリケーションを用いて、ALS(空中レーザースキャン)データの補足として、都市高架橋や橋梁、道路、トンネル下の空間の3D情報を収集します。SLAMレーザースキャナーは、ハンドヘルドモードに加え、バックパック搭載、車載、空中搭載にも対応しています。
ケース概要
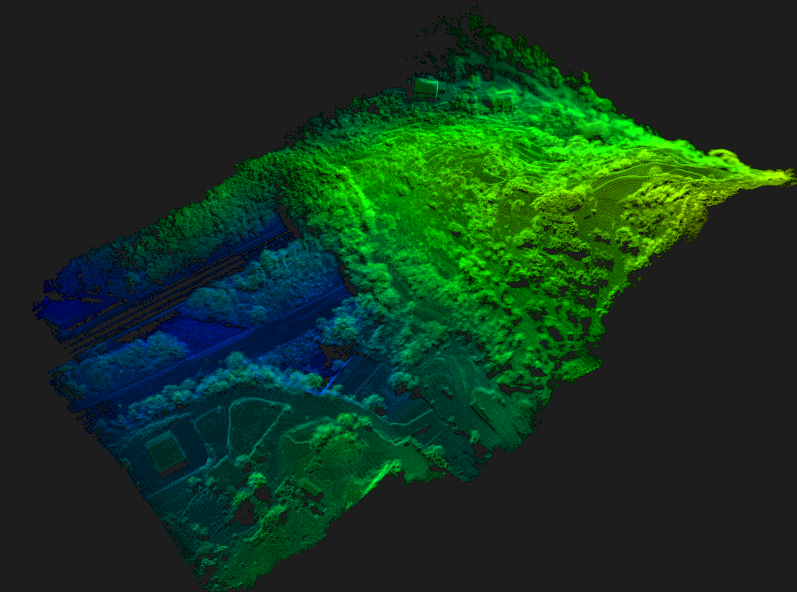
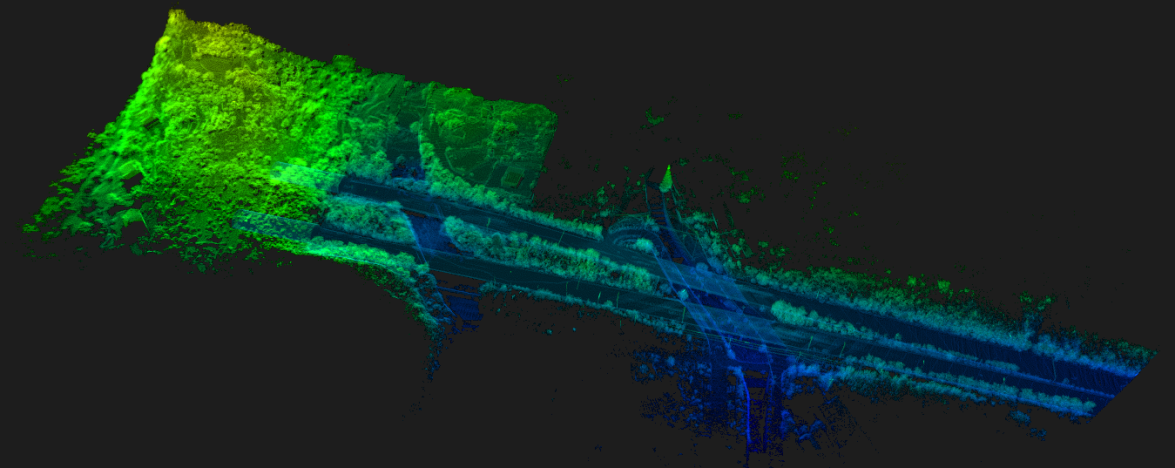
高速道路とその周辺地域のALSデータは既に取得済みですが、道路、橋梁、トンネルに関する完全な情報が不足しています。この地域の完成データをより良く表現するために、SLAMに基づくモバイルレーザースキャン技術を用いて、より詳細で完全な点群データを取得しました。図1にALSデータの原本を示します。
まず、橋梁エリアの測量を行い、点群データ取得のための事前実験など、様々な準備作業を行いました。現場環境と技術検証に基づき、点群データ取得には車載式とバックパック式の2種類のスキャン方式を選択し、より効率的かつ柔軟に高精度な点群データを取得しました。高架と橋梁下部ではバックパック式レーザースキャン方式を採用し、道路とトンネルの情報収集にはSLAMスキャナーを車両に搭載してスキャンを行いました。
バックパック型モバイルレーザースキャンシステム
屋外では、RTKを活用したバックパック型モバイルレーザースキャンシステムを使用できます。バックパック型モバイルレーザースキャンシステムは軽量かつ堅牢で、人が立ち入ることのできないエリアでも点群データを取得できます。RTK観測データとSLAMの軌跡を変換することで、絶対座標を持つ点群データを取得できます。RTK観測データは、SLAMの絶対精度を検証するための地上値として使用できます。また、RTK観測データは、閉ループ制約と同様に、グローバル観測値として追加することで、SLAMの累積誤差を補正できます。下図は、RTKを搭載したCygnusバックパック型モバイルスキャンシステムです。

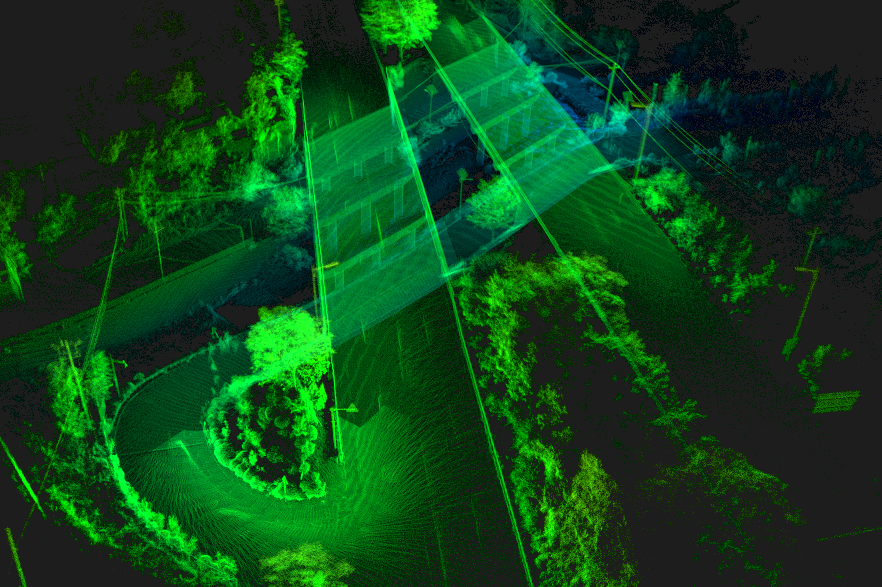
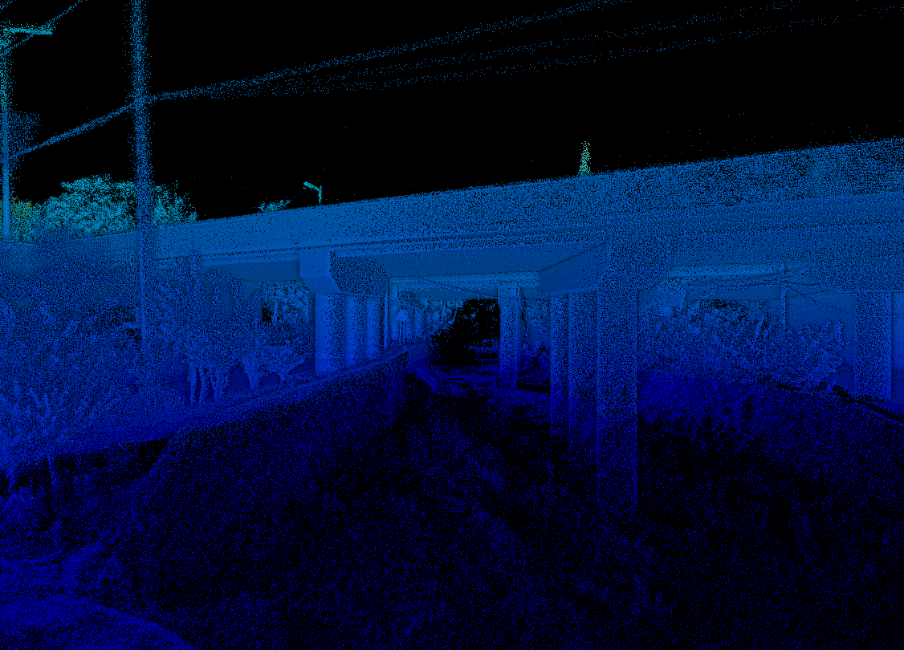
橋梁エリアの測量には、RTK搭載のCygnusバックパック型モバイルレーザーシステムを使用しました。バックパックスキャンによる点群データの概要を図3に、橋梁下部の空間の詳細は図4に示します。
オンボードSLAMスキャンシステム
SLAMスキャナーは車両アプリケーションにも拡張可能です。道路やトンネルなどの通路シーンでは、SLAMスキャナーを車両に搭載し、片道または往復で走行しながら動的にデータを収集することで、歩行によるスキャン時間を大幅に短縮できます。また、計測者にとっても比較的負担が少ないシステムです。図5-aに車両キットを、図5-bにSLAMスキャナーの車両アプリケーションの概要を示します。

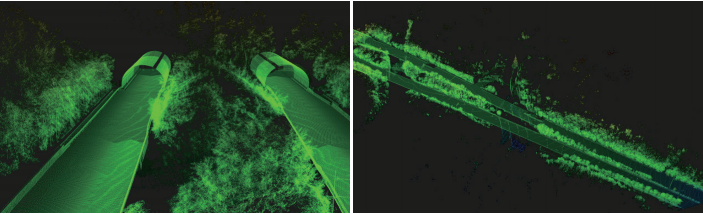
車両にはCygnus SLAMスキャナーを搭載し、RTKも活用しています。GNSS信号がロックされている場合に備えて、より高品質な結果を得るために、複数のコントロールポイントを設定しました。さらに、往復スキャン操作により軌跡を閉ループにすることで、より信頼性の高いデータを確保しています。車載スキャンの点群データは図6-aに、トンネル入口の点群は図6-bに示されています。
マルチソースポイントクラウドデータ
CygnusのSLAMマネージャーアプリを介することで、両方のタイプのデータはワンキーで自動的に解析されます。手動操作をほとんど必要としないため、実際の製造における人員と時間を大幅に節約できます。また、点群データ融合は、車両、バックパック、そして元の航空機データを一貫した座標系に統合し、*.las点群形式でエクスポートします。融合された点群データは、橋梁とその周辺環境の完全性を確保し、データの「穴」を最大限に回避します。全体のデータは図7に示されています。
結論
当社は、バックパックや車載式などSLAMレーザースキャナーの多用途性を活用してより優れたデータ収集を実行し、SLAMソリューションを他の航空リモートセンシング技術と組み合わせて、より完全で詳細な3次元都市情報を取得します。

