Application du scanner Cygnus SLAM aux levés topographiques urbains
CLIQUEZ ICI POUR TÉLÉCHARGER CETTE ÉTUDE DE CAS
Contexte du projet
Pour la cartographie topographique urbaine, dans certaines zones où l'autorisation de vol est difficile à obtenir, la topographie mobile terrestre constitue une solution idéale grâce à sa flexibilité et à ses faibles restrictions. De plus, l'utilisation de technologies de télédétection aérienne, telles que la photogrammétrie et le LiDAR aéroporté, pour la cartographie topographique urbaine ne permet pas d'obtenir des informations 3D complètes de la ville ; des données incomplètes se produisent en raison de l'occlusion d'objets au sol.
Dans le cas suivant, nous utilisons l'application multiplateforme SLAM pour collecter des informations 3D sur les viaducs urbains et l'espace sous les ponts, les routes et les tunnels, en complément des données ALS (Airborne Laser Scanning). Outre le mode portable, les scanners laser SLAM peuvent également être transportés à dos, embarqués sur véhicule et aéroportés.
Aperçu du cas
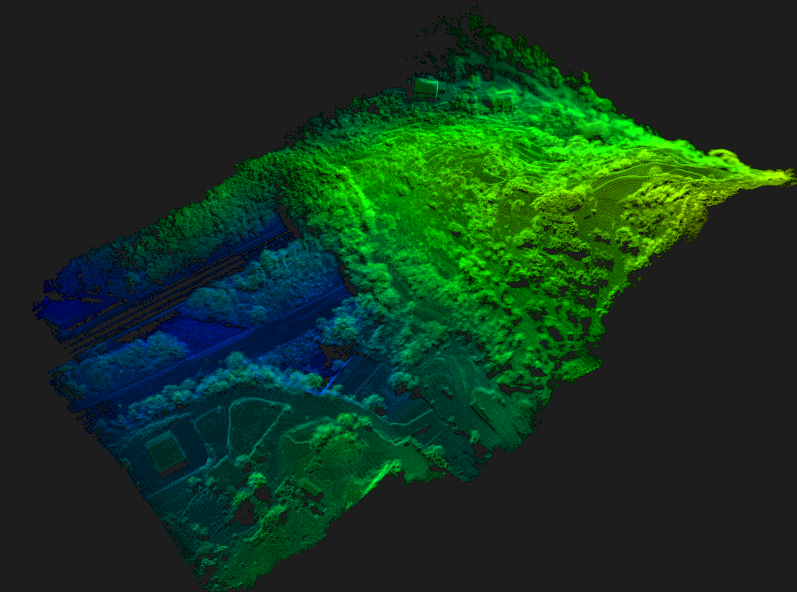
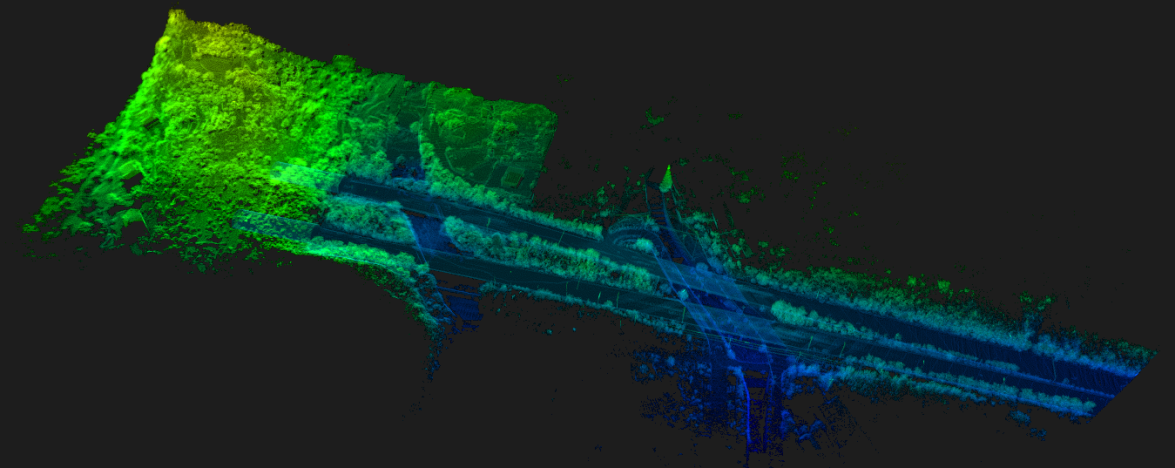
Nous disposons des données ALS originales de l'autoroute et de ses environs. Cependant, nous manquons d'informations complètes sur les routes, les ponts et les tunnels. Afin de mieux exprimer les données complètes de cette zone, nous utilisons le balayage laser mobile basé sur SLAM pour capturer des données de nuages de points plus détaillées et complètes. Les données ALS originales sont présentées dans la figure 1.
Tout d'abord, la zone du pont a été étudiée et de nombreux préparatifs, tels que l'expérimentation de pré-acquisition de données de nuages de points, ont été réalisés. Compte tenu de l'environnement de terrain et de la validation de la méthode technique, deux méthodes de numérisation, embarquée sur véhicule et avec sac à dos, ont été sélectionnées pour l'acquisition de ces données, afin d'obtenir des données de haute précision de manière plus efficace et flexible. Pour le passage supérieur et l'espace sous le pont, nous avons utilisé la méthode de numérisation laser avec sac à dos. Pour la collecte d'informations sur les routes et les tunnels, nous avons installé le scanner SLAM sur le véhicule.
Système de numérisation laser mobile pour sac à dos
En extérieur, les utilisateurs peuvent utiliser un système de balayage laser mobile à dos avec RTK. Léger et robuste, ce système permet d'obtenir des données de nuage de points dans les zones interdites aux personnes. En convertissant l'observation RTK et la trajectoire SLAM, les utilisateurs peuvent obtenir un nuage de points avec des coordonnées absolues. Les observations RTK peuvent servir de valeurs de vérité terrain pour vérifier la précision absolue du SLAM. Elles peuvent être ajoutées comme valeur d'observation globale (similaire à une contrainte en boucle fermée) pour corriger l'erreur cumulative du SLAM. L'image suivante illustre le système de balayage laser mobile à dos Cygnus avec RTK.

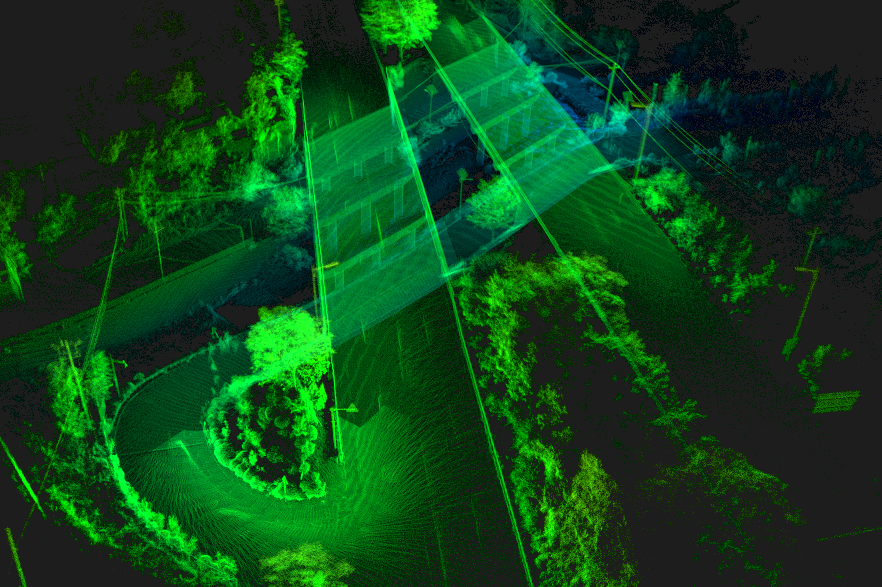
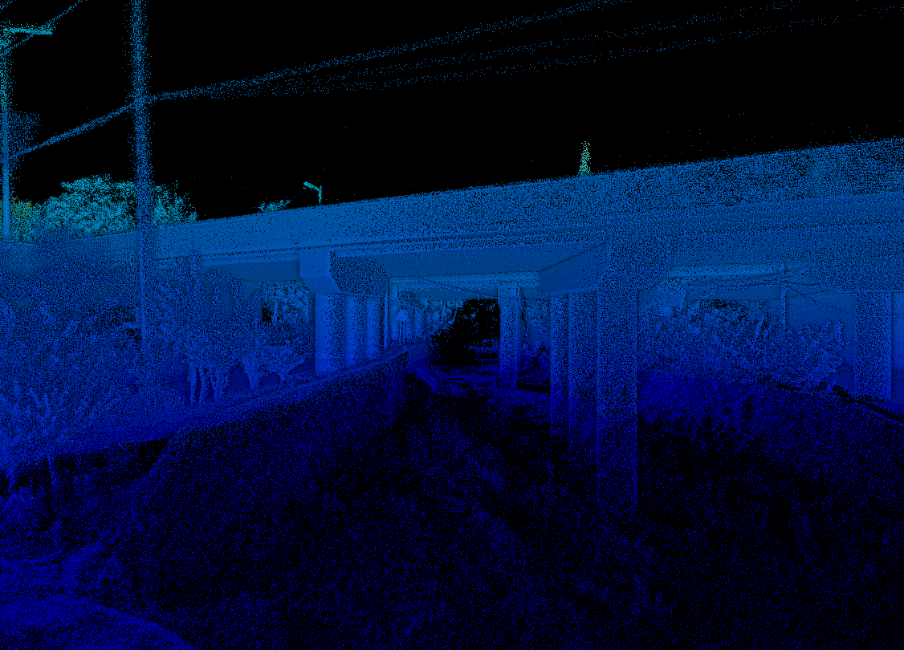
Nous utilisons le système laser mobile Cygnus avec RTK pour capturer la zone du pont. La figure 3 présente un aperçu des données du nuage de points du système de numérisation du sac à dos et la figure 4 présente le détail de l'espace sous le pont.
Système de balayage SLAM embarqué
Les scanners SLAM peuvent également être étendus aux applications véhiculaires. Pour les zones de circulation telles que les routes et les tunnels, le montage du scanner SLAM sur la voiture permet de collecter dynamiquement des données lors de déplacements à sens unique ou aller-retour, réduisant ainsi considérablement le temps de numérisation par rapport à la marche. Pour le mesureur, il est également relativement convivial. Le kit voiture est présenté à la figure 5-a, et l'application automobile du scanner SLAM à la figure 5-b.

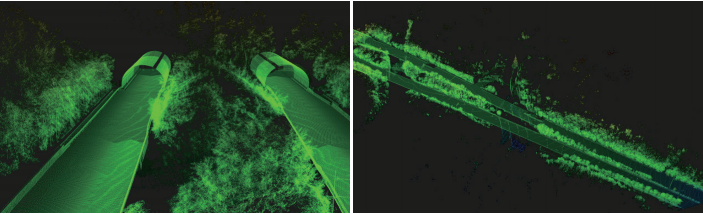
Nous avons installé des scanners Cygnus SLAM sur la voiture, ainsi que des capteurs RTK. Pour obtenir des résultats de meilleure qualité, nous avons défini plusieurs points de contrôle en cas de déverrouillage du signal GNSS. De plus, l'analyse aller-retour permet de boucler la trajectoire pour garantir des données plus fiables. Le nuage de points de l'analyse embarquée est illustré à la figure 6-a, et celui de l'entrée du tunnel à la figure 6-b.
Données de nuage de points multi-sources
Les deux types de données sont automatiquement résolus d'une seule touche grâce à l'application SLAM Manager de Cygnus. Sans intervention manuelle excessive, cela permet d'économiser considérablement de la main-d'œuvre et du temps en production. La fusion des données de nuages de points permet d'unifier les données des véhicules, des sacs à dos et des avions d'origine dans un système de coordonnées cohérent et d'exporter les données au format *.las. La fusion des données de nuages de points garantit l'intégrité du pont et de son environnement, et évite au maximum les « trous » de données. L'ensemble des données est présenté dans la figure 7.
Conclusion
Nous profitons de la polyvalence du scanner laser SLAM, tel que le sac à dos et le véhicule monté, pour effectuer une meilleure collecte de données et combiner la solution SLAM avec d'autres technologies de télédétection aérienne pour obtenir des informations urbaines tridimensionnelles plus complètes et détaillées.

