Aplicación del escáner Cygnus SLAM en levantamientos topográficos urbanos
HAGA CLIC AQUÍ PARA DESCARGAR ESTE ESTUDIO DE CASO
Antecedentes del proyecto
Para la cartografía topográfica urbana, en zonas donde no es fácil obtener permisos de vuelo, la topografía móvil terrestre es una solución ideal por su flexibilidad y menores restricciones. Además, el uso de tecnologías de teledetección aérea, como la fotogrametría y el LiDAR aerotransportado, para la cartografía topográfica urbana no permite obtener información 3D completa de la ciudad, ya que se produce un vacío de datos debido a la oclusión de objetos terrestres.
En el siguiente caso, utilizamos la aplicación multiplataforma SLAM para recopilar información 3D de viaductos urbanos y del espacio bajo puentes, carreteras y túneles, como complemento a los datos de ALS (Escaneo Láser Aerotransportado). Además del modo portátil, los escáneres láser SLAM también pueden transportarse en mochilas, en vehículos y en el aire.
Descripción general del caso
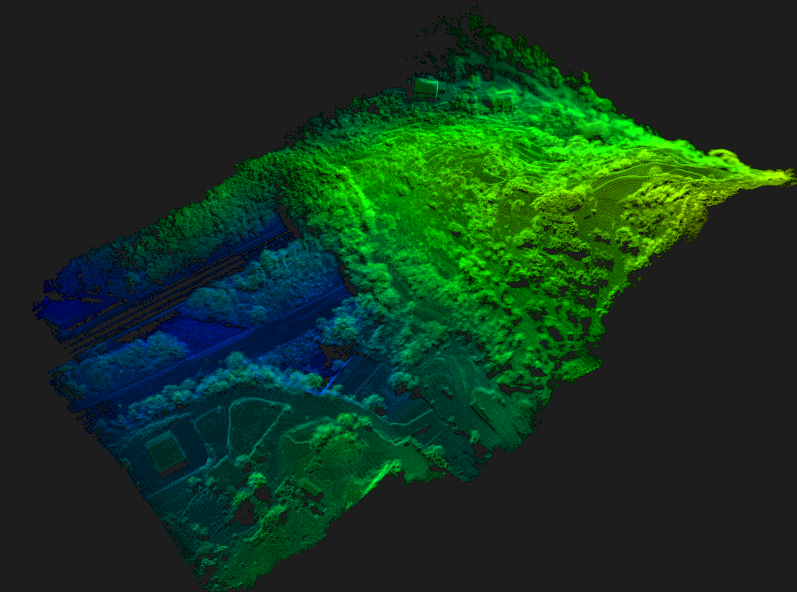
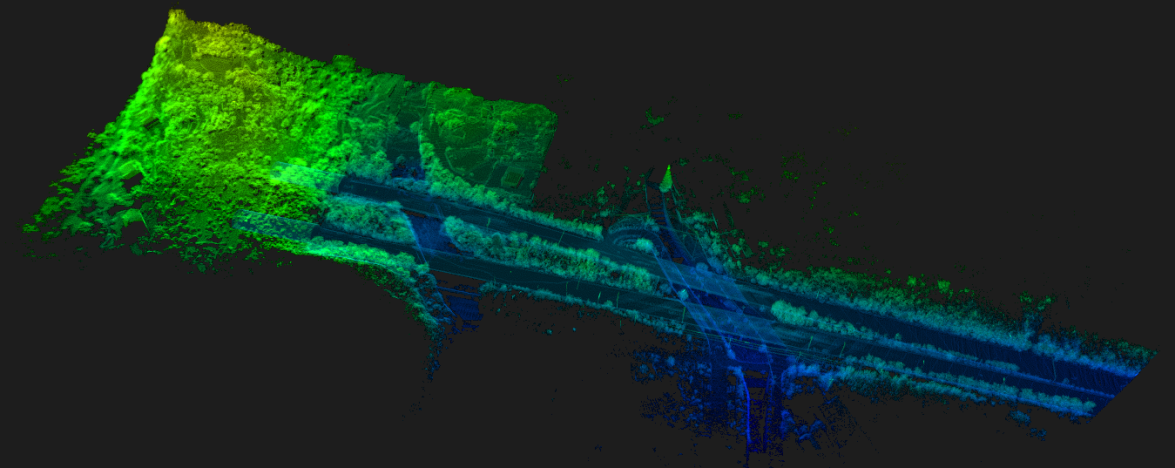
Disponemos de los datos originales del ALS de la autopista y sus alrededores; sin embargo, falta información completa sobre carreteras, puentes y túneles. Para representar mejor los datos completos de esta zona, utilizamos el escaneo láser móvil basado en SLAM para capturar datos de nubes de puntos más detallados y completos. Los datos originales del ALS se muestran en la Figura 1.
En primer lugar, se proyectó la zona del puente y se llevaron a cabo diversos preparativos, como el experimento de preadquisición de datos de nubes de puntos. En función de las condiciones de campo y la validación del método técnico, se seleccionaron dos métodos de escaneo, uno montado en vehículo y otro con mochila, para la adquisición de datos de nubes de puntos con el fin de obtener datos de alta precisión de forma más eficiente y flexible. Para el paso elevado y el espacio bajo el puente, se utilizó el método de escaneo láser con mochila. Para la recopilación de información de carreteras y túneles, se instaló el escáner SLAM en el vehículo.
Sistema de escaneo láser móvil para mochila
En exteriores, los usuarios pueden usar un sistema de escaneo láser móvil tipo mochila con RTK. Este sistema es ligero y robusto, y puede obtener datos de nubes de puntos en áreas con acceso restringido. Al convertir la observación RTK y la trayectoria SLAM, se puede obtener la nube de puntos con coordenadas absolutas. Las observaciones RTK se pueden usar como valores reales para verificar la precisión absoluta de SLAM. Las observaciones RTK se pueden agregar como un valor de observación global (similar a una restricción de bucle cerrado) para corregir el error acumulativo de SLAM. La siguiente imagen muestra el sistema de escaneo láser móvil tipo mochila Cygnus con RTK.

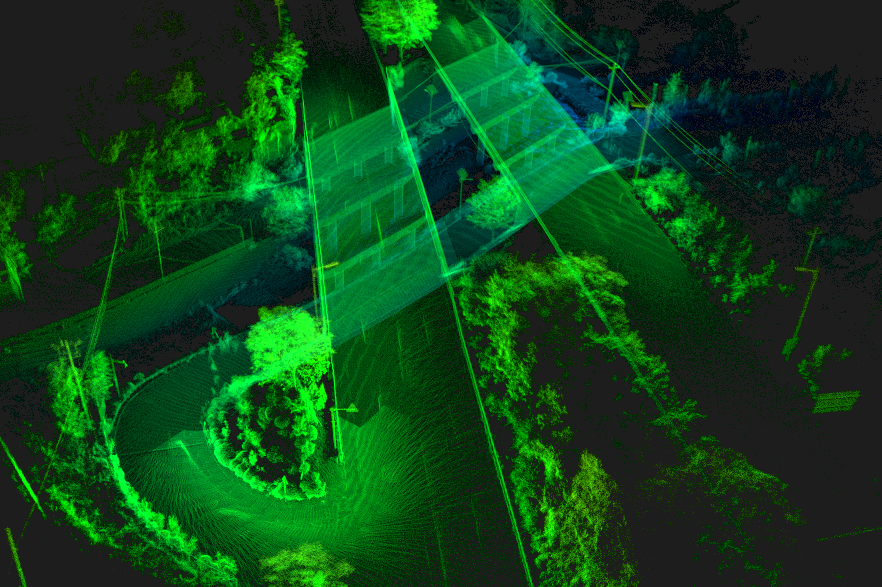
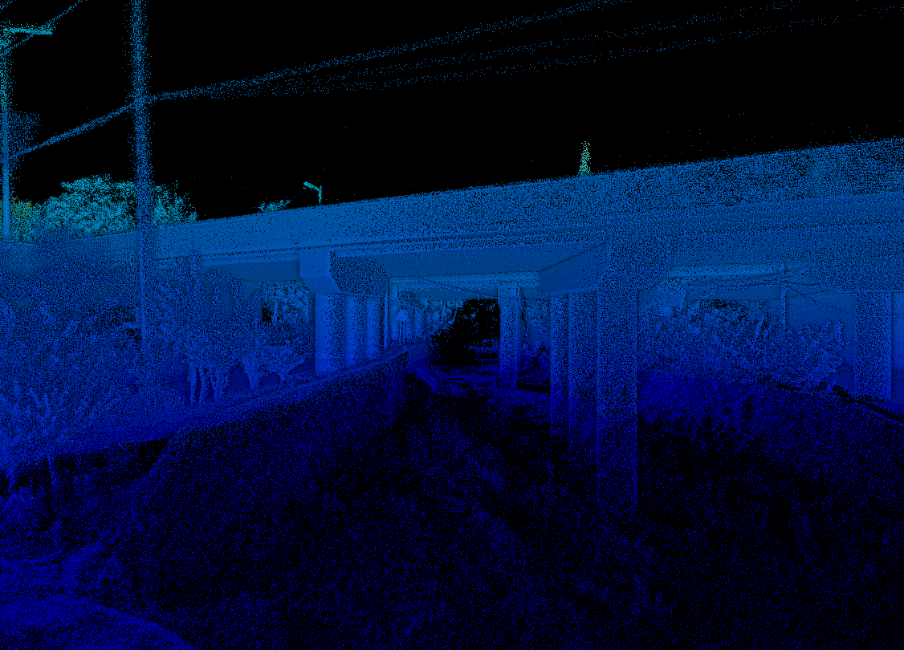
Utilizamos el sistema láser móvil Cygnus con mochila y RTK para capturar la zona del puente. La Figura 3 muestra una visión general de los datos de la nube de puntos escaneados con mochila, y la Figura 4 muestra el detalle del espacio bajo el puente.
Sistema de escaneo SLAM a bordo
Los escáneres SLAM también se pueden aplicar a vehículos. En carreteras y túneles, al instalar el escáner SLAM en el vehículo, se recopilan datos dinámicamente durante el desplazamiento en ambos sentidos, lo que reduce considerablemente el tiempo de escaneo en comparación con caminar. Además, es relativamente fácil de usar. El kit para el vehículo se muestra en la Figura 5-a, y la descripción general de la aplicación del escáner SLAM en el vehículo se muestra en la Figura 5-b.

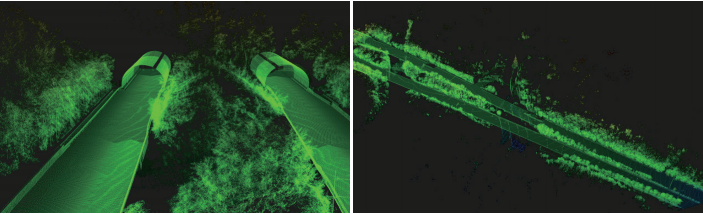
Instalamos escáneres Cygnus SLAM en el vehículo, incluyendo RTK. Para obtener resultados de mayor calidad, establecimos varios puntos de control en caso de que la señal GNSS no esté disponible. Además, realizamos un escaneo de ida y vuelta para que la trayectoria sea de bucle cerrado, lo que garantiza datos más fiables. Los datos de la nube de puntos del escaneo a bordo se muestran en la Figura 6-a, y la nube de puntos de la entrada del túnel se refleja en la Figura 6-b.
Datos de nubes de puntos de múltiples fuentes
Ambos tipos de datos se resuelven automáticamente con una sola tecla mediante la aplicación SLAM Manager de Cygnus. Sin demasiada intervención manual, se puede ahorrar considerablemente tiempo y mano de obra en la producción. La fusión de datos de nubes de puntos unifica los datos vehiculares, de mochila y aéreos originales en un sistema de coordenadas consistente y los exporta en formato *.las. La fusión de datos de nubes de puntos garantiza la integridad del puente y su entorno, y evita al máximo la "laguna" de datos. Los datos completos se muestran en la Figura 7.
Conclusión
Aprovechamos la versatilidad del escáner láser SLAM, como su montaje en mochila o en vehículo, para realizar una mejor toma de datos, y combinamos la solución SLAM con otras tecnologías de teledetección aérea para obtener información urbana tridimensional más completa y detallada.

